Focal Flow
Measuring Distance and Velocity with Defocus and Differential Motion
E. Alexander Qi Guo S.J. Koppal S.J. Gortler T. Zickler
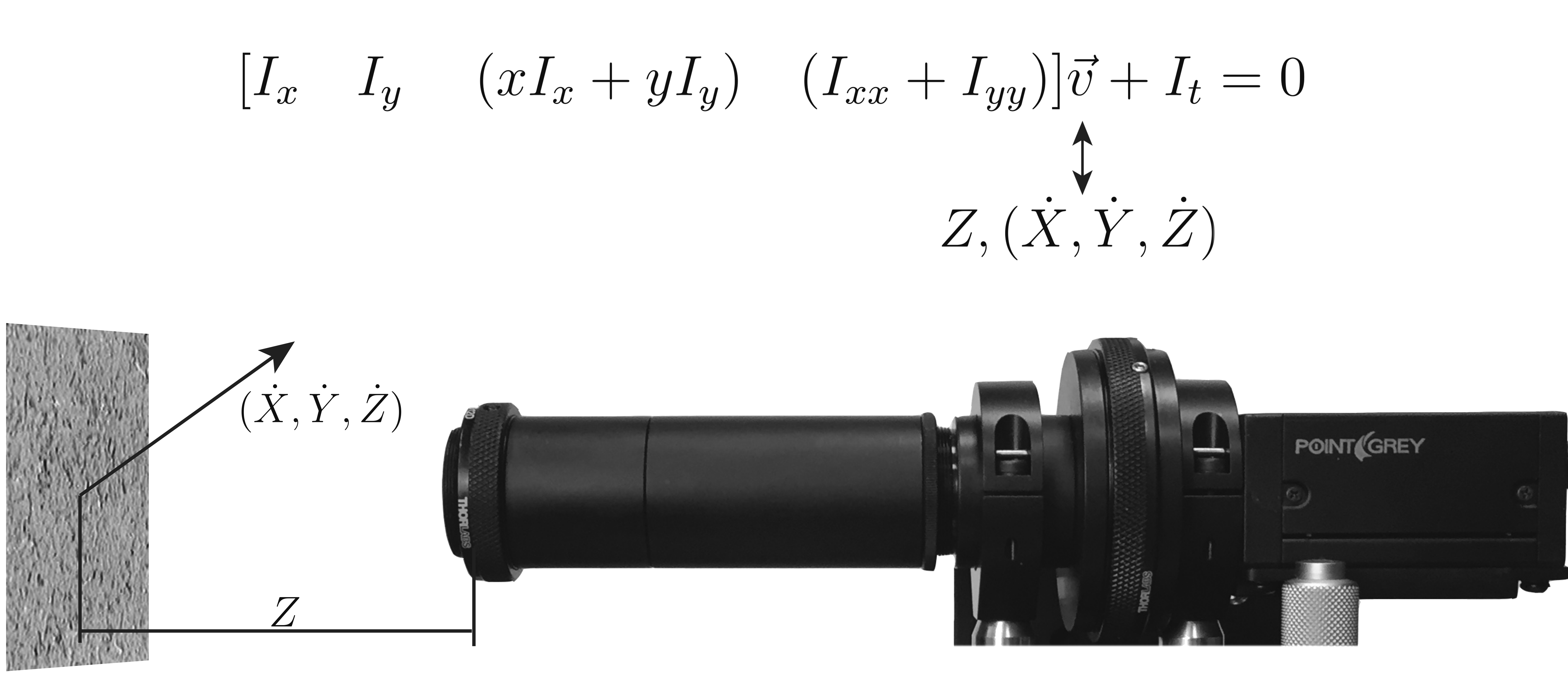
Abstract: We present the focal flow sensor. It is an unactuated, monocular camera that simultaneously exploits defocus and differential motion to measure a depth map and a 3D scene velocity field. It does so using an optical-flow-like, per-pixel linear constraint that relates image derivatives to depth and velocity. We derive this constraint, prove its invariance to scene texture, and prove that it is exactly satisfied only when the sensor's blur kernels are Gaussian. We analyze the inherent sensitivity of the ideal focal flow sensor, and we build and test a prototype. Experiments produce useful depth and velocity information for a broader set of aperture configurations, including a simple lens with a pillbox aperture.
Publication
Alexander, E., Guo, Q., Koppal, S., Gortler, S., Zickler, T.: Focal Flow: Measuring distance and velocity with defocus and differential motion. In: European Conference on Computer Vision (ECCV). Springer (2016). Best Student Paper Award!
[pdf] [technical report] [code] [ECCV poster] [ECCV slides] [ECCV oral]
Alexander, E., Guo, Q., Koppal, S., Gortler, S.J. and Zickler, T., 2017. Focal Flow: Velocity and Depth from Differential Defocus Through Motion. International Journal of Computer Vision, pp.1-22. [pdf]