VR Stereoscope
A simple smartphone-based stereoscope

Usage
- Acquire some smartphone VR glasses. We suggest something cheap and foldable that does not obstruct your touchscreen, like the Homido Mini or Pocket 360.
- Launch a browser on your phone. In Android use Chrome; in iOS use Safari.
- Point your phone's browser to the current page, either by typing the URL or by scanning this QR
code:

- In your phone's browser, click one of the stereo thumbnails in the galleries below
- Enter VR Mode by hitting the VR button and rotating your phone to landscape orientation
- To return to this page from VR Mode, touch your phone's screen to reveal the browser's title bar and then click the Back button
Troubleshooting:
- If the stimulus appears blurry or strange in VR mode, make sure your VR glasses are perfectly centered and aligned on your phone. It may take some fiddling.
- If Safari's title bar does not disappear in VR Mode, try this:
- Close all browser tabs except for the current page
- Rotate your phone to portrait orientation and then back to landscape
- If all else fails, you can at least reduce its size by clicking
aA->Hide Toolbarin the address bar
Gallery 1: Perceptual Stimuli
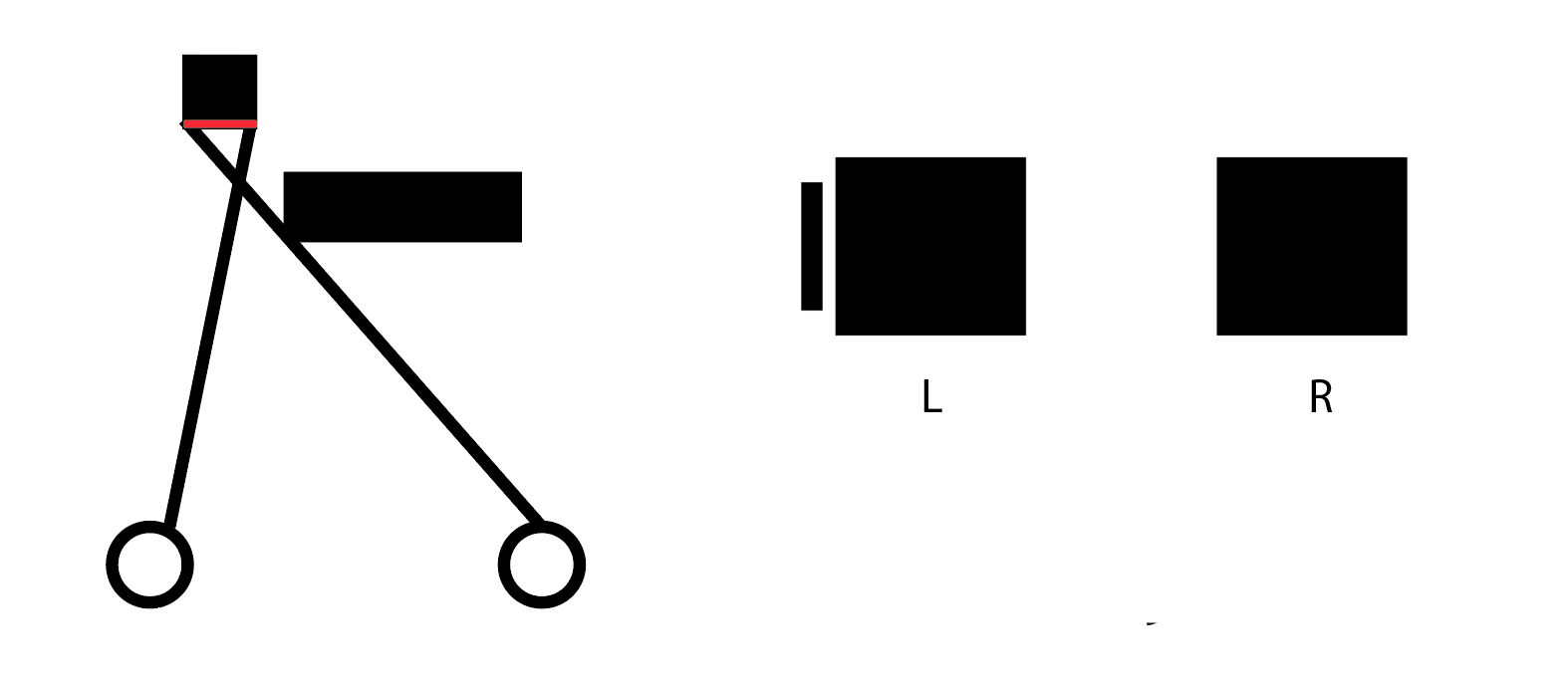
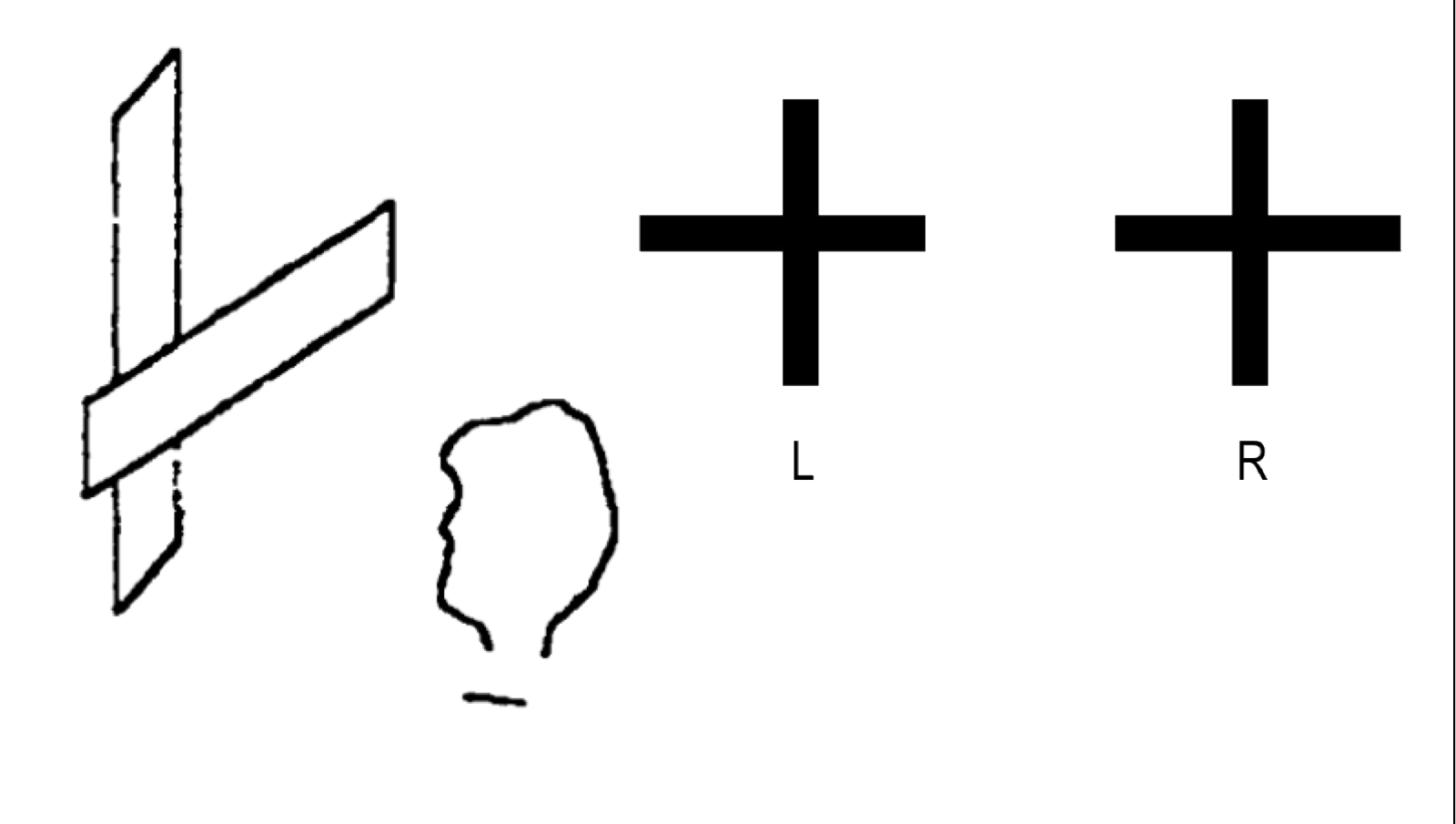
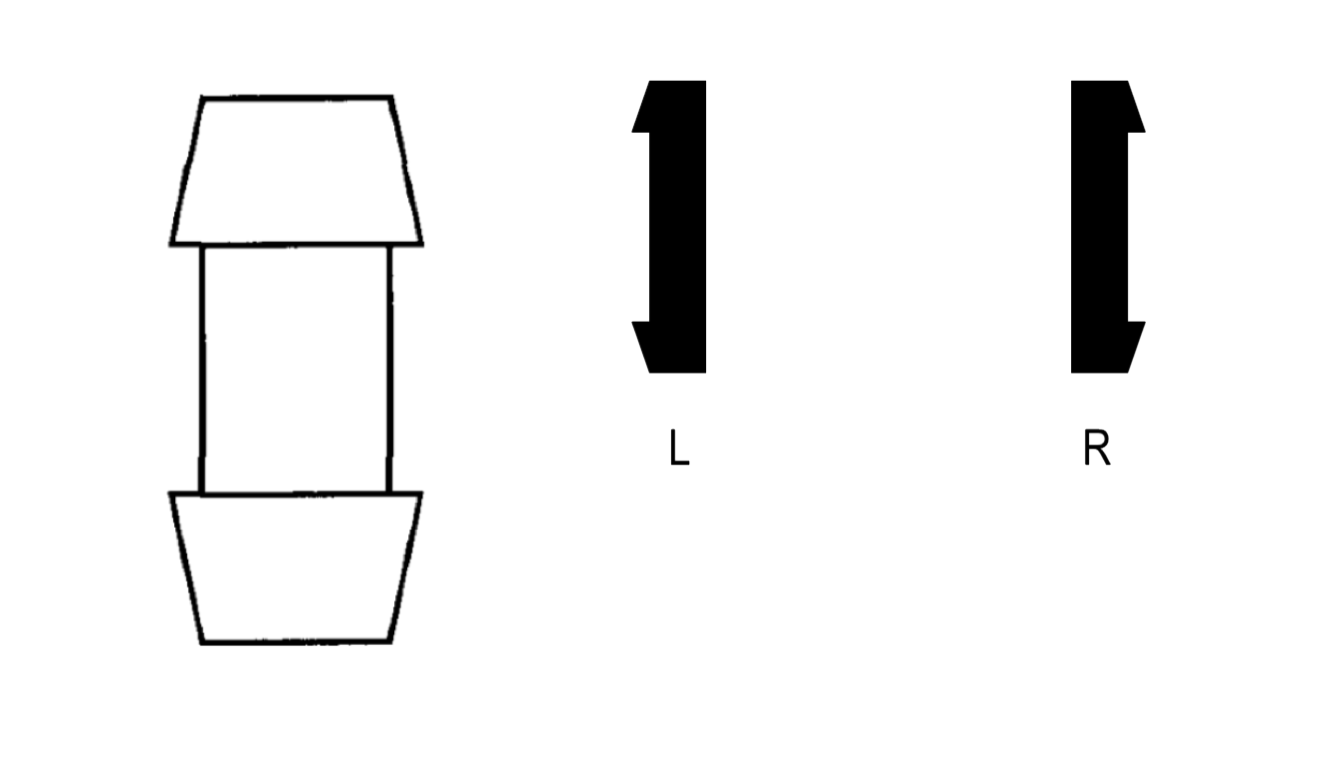
These images were invented by scientists to understand how stereo vision works in humans. The sense of depth is only apparent when they are viewed stereoscopically. In many cases, the perceived shape is strongly influenced by "unmatched features", meaning features that are visible to one eye but not the other. Beside each thumbnail is a diagram of the perceived shape relative to two eyes, with the "unmatched features" drawn in red.



(Tsirlin et al, 2010)

(Tsirlin et al, 2010)

(Tsirlin et al, 2010)


(Belhumuer, 1996)

(Nakayama and Shimojo, 1990)

(Anderson and Nakayama, 1994)

(Anderson and Nakayama, 1994)


(Belhumuer, 1996)

(Nakayama et al, 1990)

(Von Szily, 1921, Ehrenstein and Gillam, 1998)

(Von Szily, 1921, Ehrenstein and Gillam, 1998)

(Von Szily, 1921, Ehrenstein and Gillam, 1998)

(Von Szily, 1921, Ehrenstein and Gillam, 1998)
Gallery 2: Interactive Perceptual Stimuli (Beta)
These are interactive versions, where the stimulus is meant to change as you rotate your head horizontally.


Gallery 4: Use Your Own
View your own images stereoscopically by pasting two URLs and clicking Go.
(Higher resolution images produce a better effect but take longer to load. If your
screen is persistently blank in VR mode, check the image server's access controls.)
Another way to see your own images is by passing their URLs as query strings. The syntax is
(base URL)?lImg=(left image URL)&rImg=(right image URL)
For example, an equivalent way to launch the Two Planes stimulus above is by typing
StereoPages/static.html?lImg=/stereoscope/assets/StereoImages/1_1/2048one_l.png
&rImg=/stereoscope/assets/StereoImages/1_1/2048one_r.png
Modify the VR Stereoscope
This VR Stereoscope is built in A-Frame, with contributions from
Oliver Habert, Anubha Srivastava, and Jialiang Wang.
The code is minimal. You can
Fork
on github or

Research Papers
The perceptual stimuli were collected in the following papers to study perceptually-consistent computer vision stereo algorithms. Our algorithms properly use the occlusion cue, and as a result, they work in most of these stimuli whereas many state-of-the-art algorithms fail completely. However, the Wallpapers, Cross, Folded Paper and Cylinders stimuli remain open research problems.
For more, including supplementary materials, posters, data and slides, see this project page.
Toward perceptually-consistent stereo: A scanline study
Jialiang Wang, Daniel Glasner, and Todd Zickler
In Proc. International Conference on Computer Vision (ICCV), 2017.
Local Detection of Stereo Occlusion Boundaries
Jialiang Wang and Todd Zickler
In Proc. Computer Vision and Pattern Recognition (CVPR), 2019.
References for Perceptual Stimuli
- A. von Szily. Stereoskopische Versuche mit Schattenrissen. Albrecht von Graefes Archiv fur Ophthalmologic, 105 964-972 und Tafel VI, 1921.
- B. Julesz. Binocular depth perception without familiarity cues. Science, 145(3630):356–362, 1964.
- K. Nakayama and S. Shimojo. Da Vinci Stereopsis: Depth and subjective occluding contours from unpaired image points. Vision research, 30(11):1811–1825, 1990.
- K. Nakayama and S. Shimojo. Experiencing and perceiving visual surfaces. Science, 257(5075):1357-63, 1992.
- B.L. Anderson and K. Nakayama. Toward a general theory of stereopsis: binocular matching, occluding contours, and fusion. Psychological review, 101(3):414, 1994.
- P.N. Belhumeur. A Bayesian approach to binocular steropsis. International Journal of Computer Vision, 19(3):237–260, 1996.
- W.H. Ehrenstein and B.J. Gillam. Early demonstrations of subjective contours, amodal completion, and depth from half-occlusions: “Stereoscopic experiments with silhouettes” by Adolf von Szily (1921). Perception, 27(12):1407-16, 1998.
- I. Tsirlin, L.M. Wilcox, and R.S. Allison. Monocular occlusions determine the perceived shape and depth of occluding surfaces. Journal of Vision, 10(6):11–11, 2010.